Wandering Application with Multi-camera Rtabmap in Gazebo* Simulation#
This tutorial explains how to use Rtabmap with four cameras simulated inside Gazebo, using the House environment.
Run the Sample Application#
If your system has an Intel® GPU, follow the steps in the Get Started Guide for Robots to enable the GPU for simulation. This step improves the Gazebo simulation performance.
Check if your installation has all the necessary Docker* images.
docker images |egrep "amr-turtlebot3|amr-rtabmap|amr-nav2|amr-wandering" #if you have them installed, the result is: amr-turtlesim amr-rtabmap amr-nav2 amr-wandering
Note
If these images are not installed, continuing with these steps triggers a build that takes longer than an hour (sometimes, a lot longer depending on the system resources and internet connection). Intel® recommends checking your installation with FastMapping Algorithm or installing the Robot Complete Kit with the Get Started Guide for Robots.
Check that EI for AMR environment is set:
echo $AMR_TUTORIALS # should output the path to EI for AMR tutorials /home/user/edge_insights_for_amr/Edge_Insights_for_Autonomous_Mobile_Robots_2023.1/AMR_containers/01_docker_sdk_env/docker_compose/05_tutorials
If nothing is output, refer to Get Started Guide for Robots Step 5 for information on how to configure the environment.
Use
docker composeto execute the Wandering app Docker* container:docker compose -f $AMR_TUTORIALS/wandering_rtabmap_4_cameras.tutorial.yml up 2> errlogs.txt 1> logs.txt
This command will write logs to a text file named
logs.txt. It is recommended to log to a file rather than the console so that navigating the large quantity of logs is easier.Expected result:
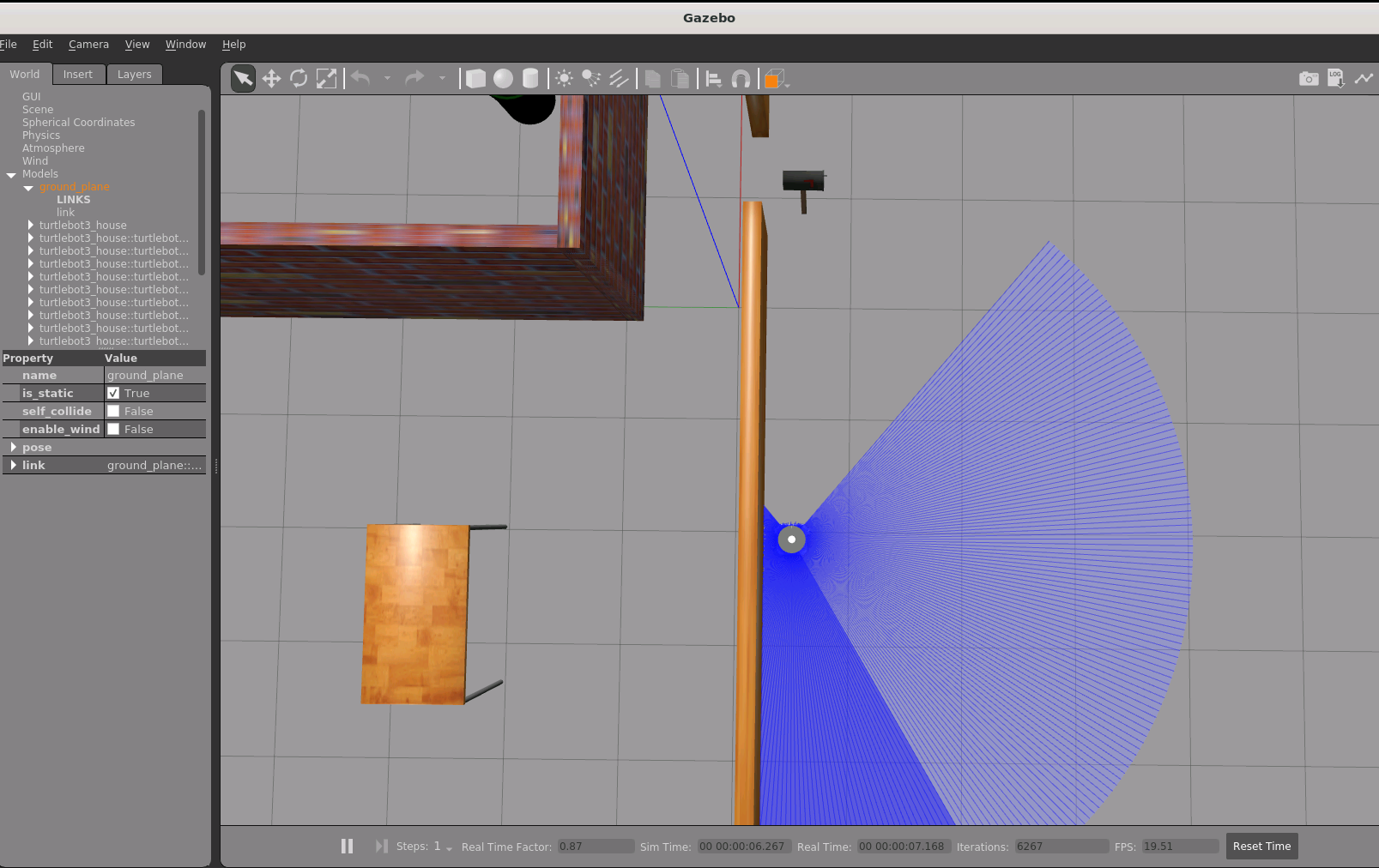
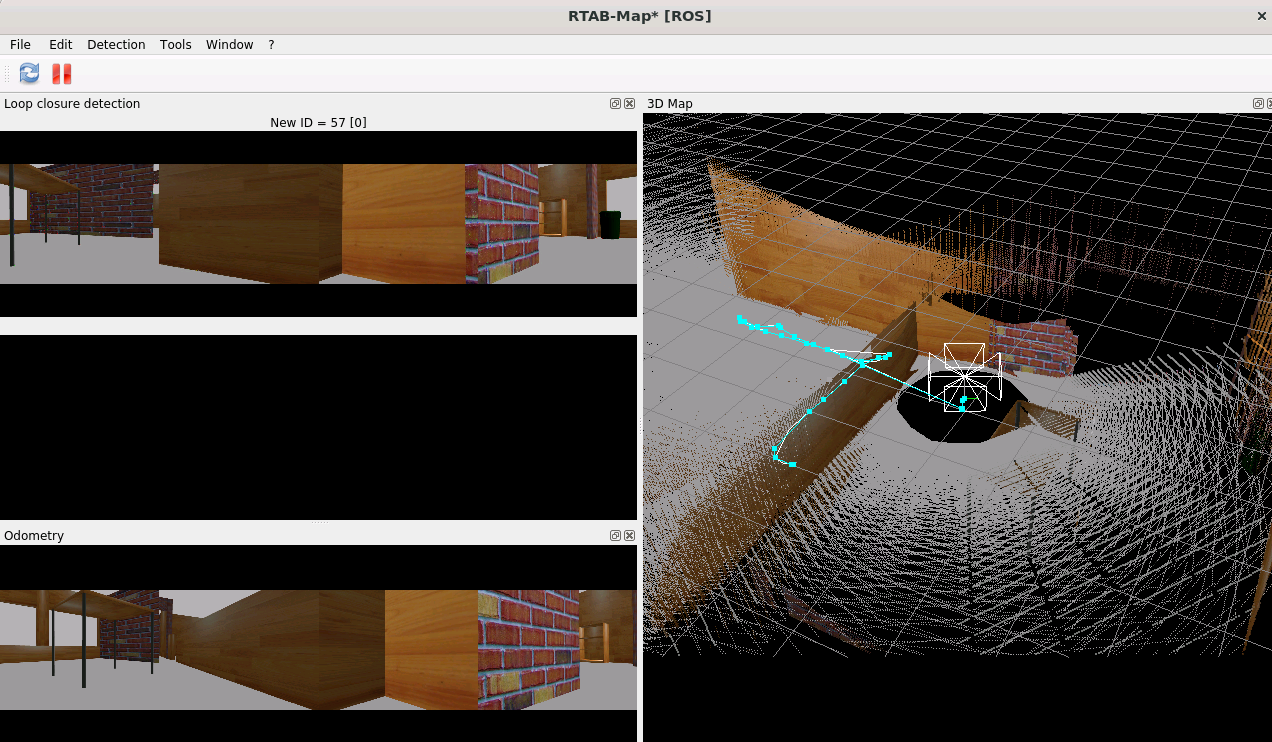
The robot starts wandering inside the simulation. The robot’s path and 3D point cloud should be visible within gazebo-sim and rtabmap-viz. (For more clarity, try right-clicking on 3d view and enable free camera, view of grid, and frustums of cameras)
To stop the Wandering app, do the following:
Type
Ctrl-cin the terminal executing the Docker* containerRemove the stopped containers:
docker compose -f $AMR_TUTORIALS/multi_camera_rtabmap.yml down --remove-orphans
Troubleshooting#
If the .yml is started with a different user, the Gazebo* model fails.
In case of such a failure, verify that the file 01_docker_sdk_env/docker_compose/01_amr/.env contains the line
CHOOSE_USER=eiforamr
For general robot issues, refer to: Troubleshooting for Robot Tutorials.