Turtlesim#
Run a ROS 2 simulation sample application in the Docker* container.
Check if your installation has the turtlesim Docker* image.
docker images |grep amr-turtlesim #if you have it installed, the result is: amr-turtlesim
Note
If the image is not installed, continuing with these steps triggers a build that takes longer than an hour (sometimes, a lot longer depending on the system resources and internet connection).
If the image is not installed, Intel® recommends installing the Robot Complete Kit (see Get Started Guide for Robots Step 3).
Check that EI for AMR environment is set:
echo $AMR_TUTORIALS # should output the path to EI for AMR tutorials /home/user/edge_insights_for_amr/Edge_Insights_for_Autonomous_Mobile_Robots_2023.1/AMR_containers/01_docker_sdk_env/docker_compose/05_tutorials
If nothing is output, refer to Get Started Guide for Robots Step 5 for information on how to configure the environment.
Run an automated yml file that opens a ROS 2 sample application inside the EI for AMR Docker* container.
docker compose -f $AMR_TUTORIALS/turtlesim.tutorial.yml up
Go to Plugins > Services > Service Caller: Choose to move turtle1 by choosing (from the Service drop-down list) /turtle1/teleport_absolute and make sure you changed x and y coordinates for the original values. Press Call. The turtle should move. Close the service caller window by pressing x. Then type
Ctrl-c.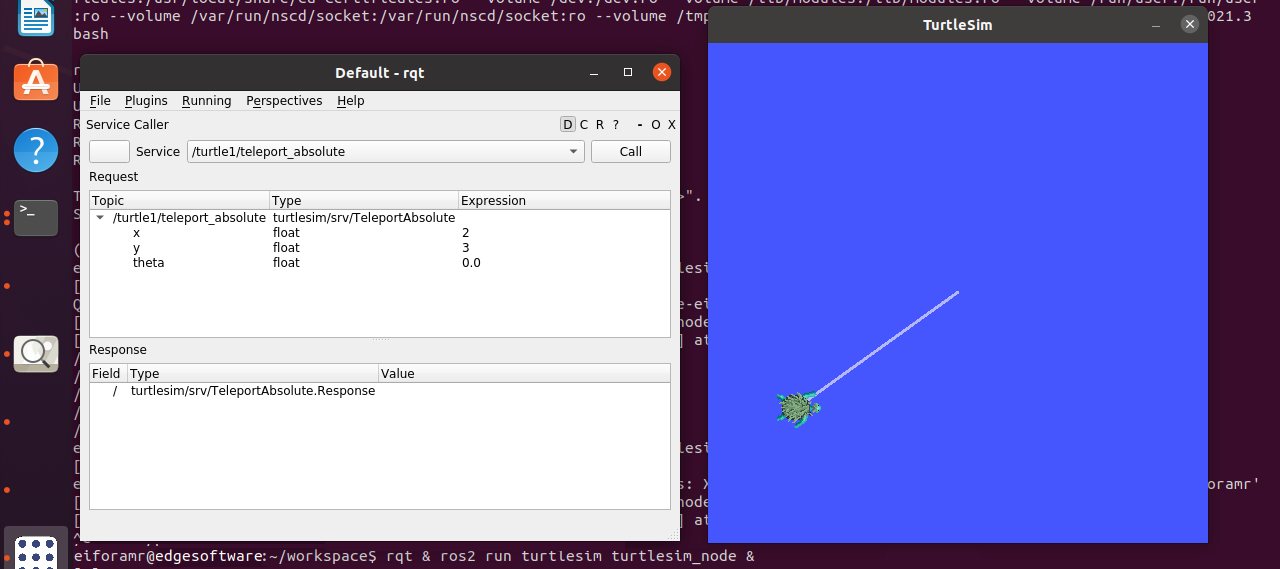
To close this, do the following:
Type
Ctrl-cin the terminal where you did the up command.Run this command in another terminal:
docker compose -f $AMR_TUTORIALS/turtlesim.tutorial.yml down
For an explanation of what happened, open the yml file:
The first 23 lines are from the EI for AMR infrastructure.
Line 26 starts the
turtlesimROS 2 node.Line 31 starts the rqt so that the turtle can be controlled.