Wandering Application in a Waffle Gazebo* Simulation#
This tutorial shows a TurtleBot* 3 simulated in a waffle world. For more information about TurtleBot* 3 and the waffle world, see this.
Run the Sample Application#
If your system has an Intel® GPU, follow the steps in the Get Started Guide for Robots to enable the GPU for simulation. This step improves Gazebo* simulation performance.
Check if your installation has the turtlesim Docker* image.
docker images |egrep "amr-turtlebot3|amr-rtabmap|amr-nav2|amr-wandering" #if you have them installed, the result is: amr-turtlebot3 amr-rtabmap amr-nav2 amr-wandering
Note
If one or more of the images are not installed, continuing with these steps triggers a build that takes longer than an hour (sometimes, a lot longer depending on the system resources and internet connection).
If one or more of the images are not installed, Intel® recommends installing the Robot Complete Kit with the Get Started Guide for Robots.
Check that EI for AMR environment is set:
echo $AMR_TUTORIALS # should output the path to EI for AMR tutorials /home/user/edge_insights_for_amr/Edge_Insights_for_Autonomous_Mobile_Robots_2023.1/AMR_containers/01_docker_sdk_env/docker_compose/05_tutorials
If nothing is output, refer to Get Started Guide for Robots Step 5 for information on how to configure the environment.
Run this command to start the Docker* container:
docker compose -f $AMR_TUTORIALS/wandering_gazebo.tutorial.yml up
Expected output:
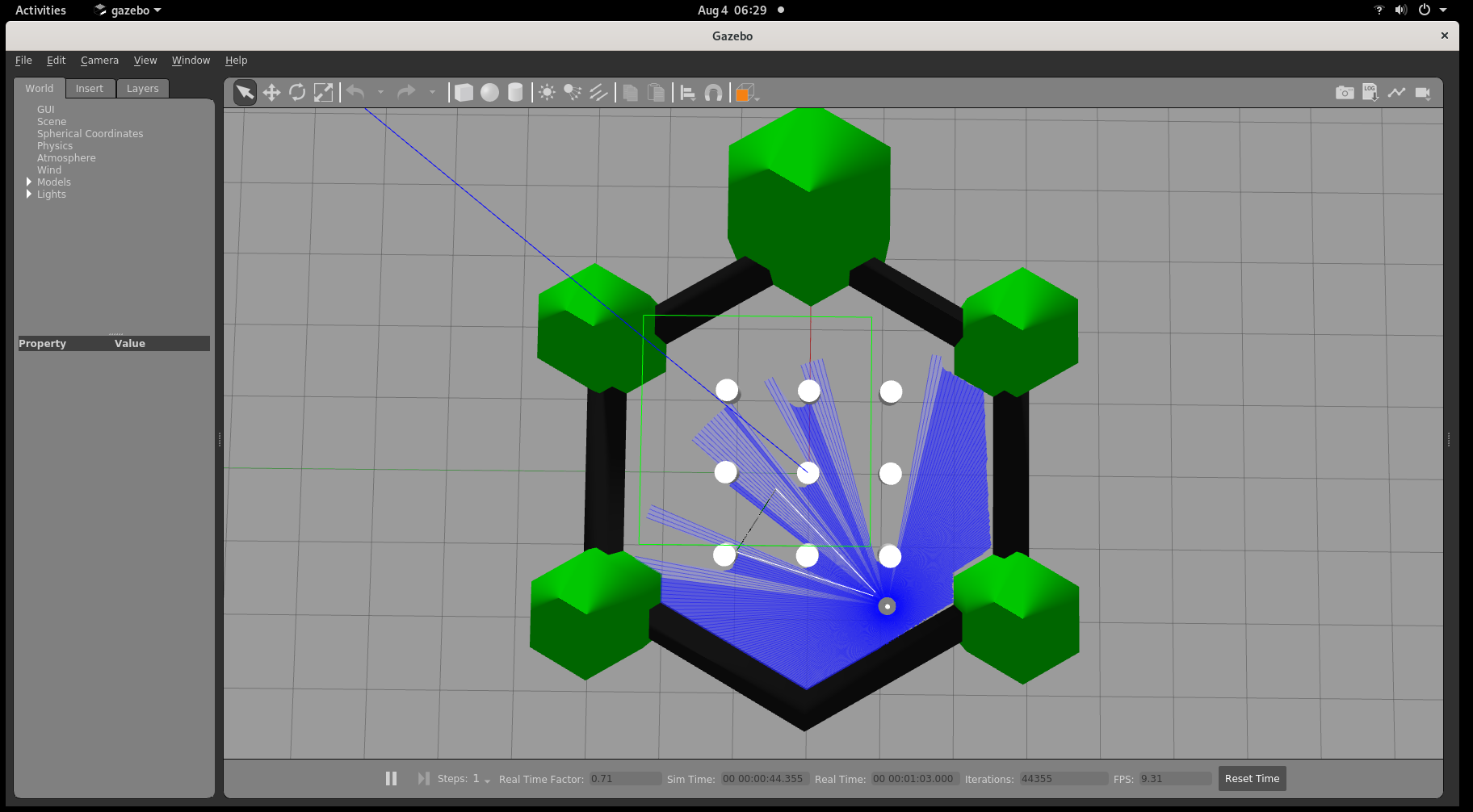
After Gazebo* starts, the robot starts wandering inside the simulation. See the simulation snapshot:
To increase performance, the real time update rate can be set to 0:
In Gazebo*’s left panel, go to the World Tab, and click Physics.
Change the real time update rate to 0.
To close this, do the following:
Type
Ctrl-cin the terminal where you did the up command.Remove the stopped containers:
docker compose -f $AMR_TUTORIALS/wandering_gazebo.tutorial.yml down --remove-orphans
Troubleshooting#
If the robot is not moving but Gazebo* has started, start the wandering application manually by opening a container shell and entering:
docker compose -f $CONTAINER_BASE_PATH/01_docker_sdk_env/docker_compose/01_amr/amr-sdk.all.yml run wandering bash
ros2 run wandering_app wandering
For general robot issues, go to: Troubleshooting for Robot Tutorials.