Wandering Application on AAEON robot with Intel® RealSense™ Camera and RTAB-Map SLAM¶
This tutorial details the steps to install Wandering Application with Intel® RealSense™ camera input and create a map using RTAB-Map Application.
Getting Started¶
Install Deb package¶
Install the ros-humble-wandering-aaeon-tutorial Deb package from the Intel® Robotics SDK APT repository.
sudo apt update sudo apt install ros-humble-wandering-aaeon-tutorial
Run Demo¶
Run the following commands to create a map using RTAB-Map and Wandering Application tutorial on the Aaeon robot.
source /opt/ros/humble/setup.bash ros2 launch wandering_aaeon_tutorial wandering_aaeon.launch.py
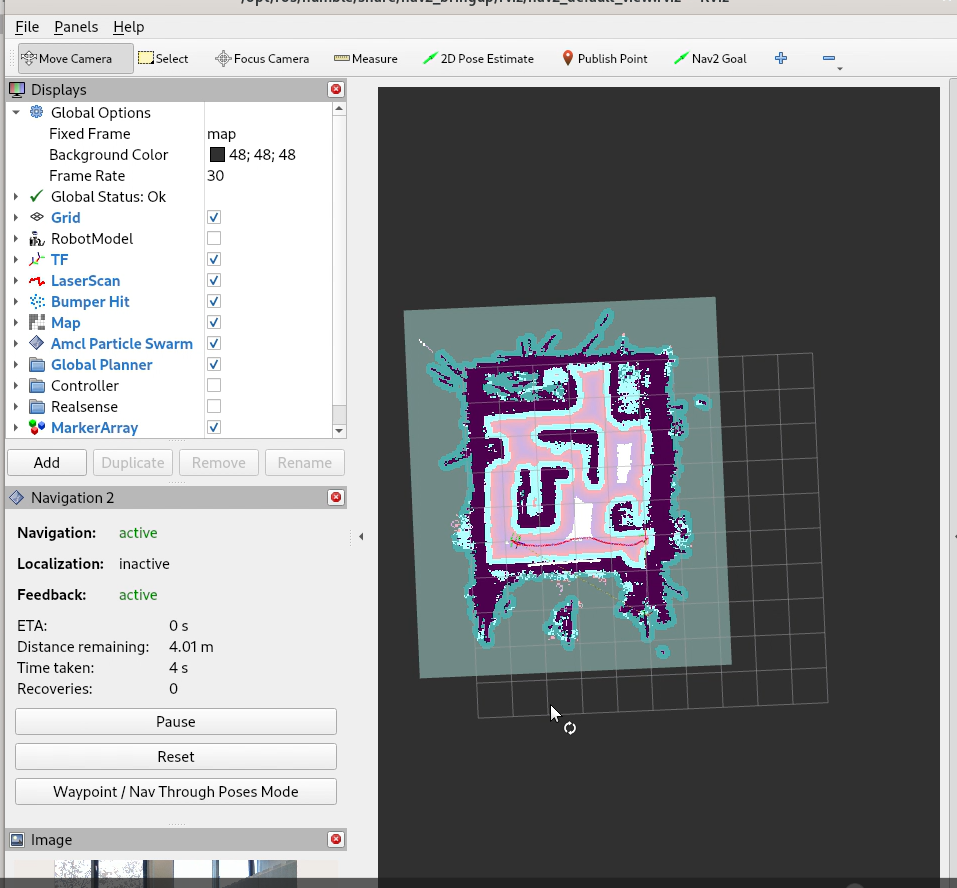
Once the command is executed, the robot starts moving and creates a map with RTAB-Map Application.
Troubleshooting¶
You can stop the demo anytime by pressing
ctrl-C.For general robot issues, go to: Troubleshooting for Robotics SDK Tutorials .