ADBSCAN Algorithm with RPLIDAR Input Demo¶
This tutorial describes how to run the ADBSCAN algorithm from Robotics SDK using 2D RPLIDAR input.
It outputs to the obstacle_array topic of type
nav2_dynamic_msgs/ObstacleArray.
Install¶
Install ros-humble-adbscan-ros2 Deb package from Intel® Robotics SDK APT repository
sudo apt update sudo apt install ros-humble-adbscan-ros2
Install the following package with ROS 2 bag files in order to publish point cloud data from 2D LIDAR or Intel® RealSense™ camera
sudo apt install ros-humble-bagfile-laser-pointcloud
Run the demo with 2D LIDAR¶
sudo chmod +x /opt/ros/humble/share/adbscan_ros2/scripts/demo_lidar.sh /opt/ros/humble/share/adbscan_ros2/scripts/demo_lidar.sh
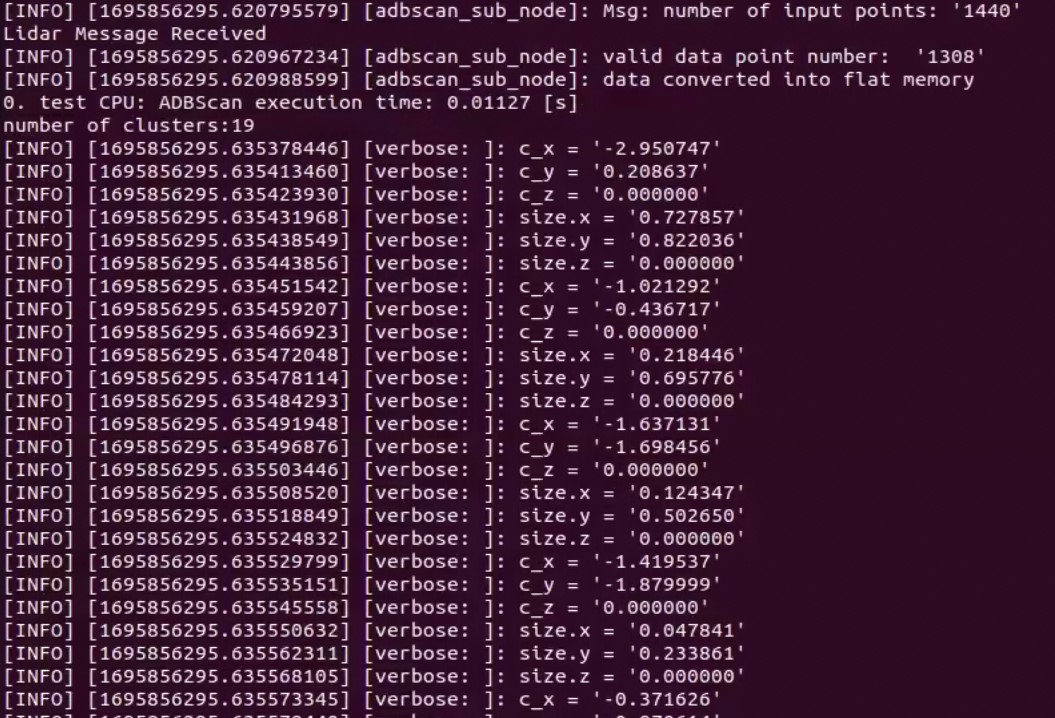
Expected output: ADBSCAN prints logs of its interpretation of the LIDAR data coming from the ROS 2 bag.
One can view the list of running ROS 2 nodes by typing ros2 node list in a terminal.
