ADBSCAN on AAEON Robot Kit¶
This tutorial describes how to run the ADBSCAN algorithm on the real robot UP Xtreme i11 AAEON Robot Kit using the Intel® RealSense™ camera input. During the execution of the program the ADBSCAN algorithm detects objects, and draws them in rviz. Then, the FastMapping algorithm uses data from the ADBSCAN to generate a 2D Map of the environment around. User can use the default setup to move robot via gamepad or keyboard, so the 3D-camera on the robot can scan surroundings around.
Prerequisites:
Assemble your robotic kit following the instructions provided by AAEON.
Ensure the system is setup correctly.
To control the robot remotely, you may need a Logitech* F710 gamepad (to be purchased separately).
Run the ADBSCAN Algorithm Using the AAEON Robot Kit¶
To download and install the tutorial run the command below:
sudo apt-get install ros-humble-aaeon-adbscan-tutorial-common sudo apt-get install ros-humble-aaeon-adbscan-tutorial

Please perform IMU calibration of the robot, launch script below:
source /opt/ros/humble/setup.bash /opt/ros/humble/share/ros2_amr_interface/scripts/calibration.sh
Place the robot in front of an object and use one of the two methods described below to control the robot:

Gamepad Robot Control Method¶
Launch the ADBSCAN AAEON Robot gamepad control program:
sudo chmod a+rw /dev/input/js0 sudo chmod a+rw /dev/input/event*
source /opt/ros/humble/setup.bash /opt/ros/humble/share/aaeon_adbscan/tutorial-aaeon-adbscan/aaeon_robot_with_adbscan_realsense_gamepad.sh
Move the robot around using the gamepad:

Hold the RB button, then press the Mode button on the joystick.
The green LED near this button should illuminate.
Use the D-pad to control the robot’s movement.

Keyboard Robot Control Method¶
Launch the ADBSCAN AAEON Robot keyboard control program:
source /opt/ros/humble/setup.bash /opt/ros/humble/share/aaeon_adbscan/tutorial-aaeon-adbscan/aaeon_robot_with_adbscan_realsense_keyboard.sh
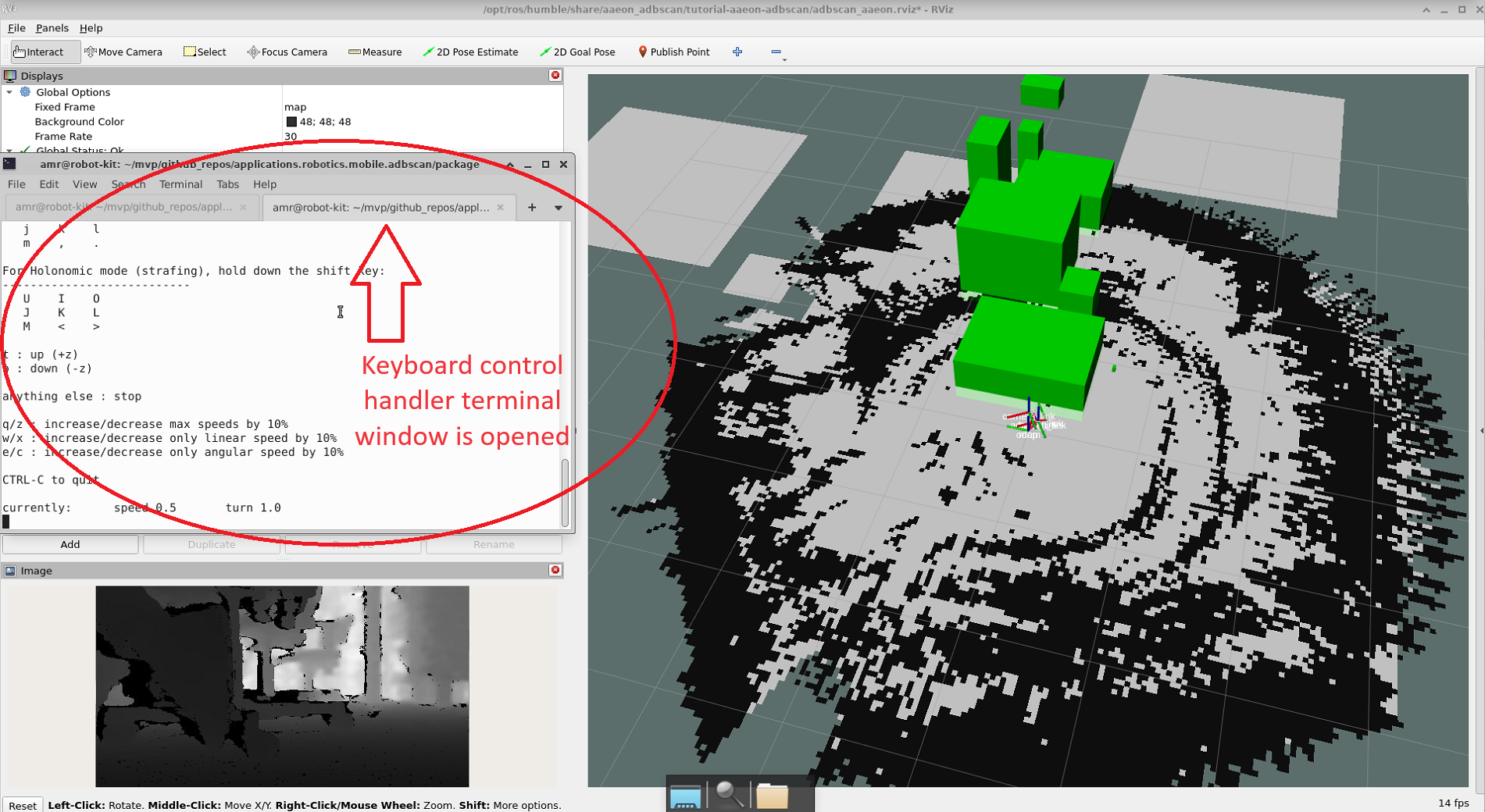
In a separate Terminal window launch keyboard control handler:
source /opt/ros/humble/setup.bash ros2 run teleop_twist_keyboard teleop_twist_keyboard
The robot responds to your keyboard commands in these ways:
i: Move forward
k: Stop
,: Move backward
j: Turn right
l: Turn left
q/z: Increase/decrease max speeds by 10%
w/x: Increase/decrease only linear speed by 10%
e/c: Increase/decrease only angular speed by 10%
L or J (only for omnidirectional robots): Strafe (move sideways)
anything else: Stop
Ctrl-c: Quit
Move the robot around using the keyboard buttons:
Note
To keep keyboard controls working keep second terminal window above other windows.
Expected Results¶
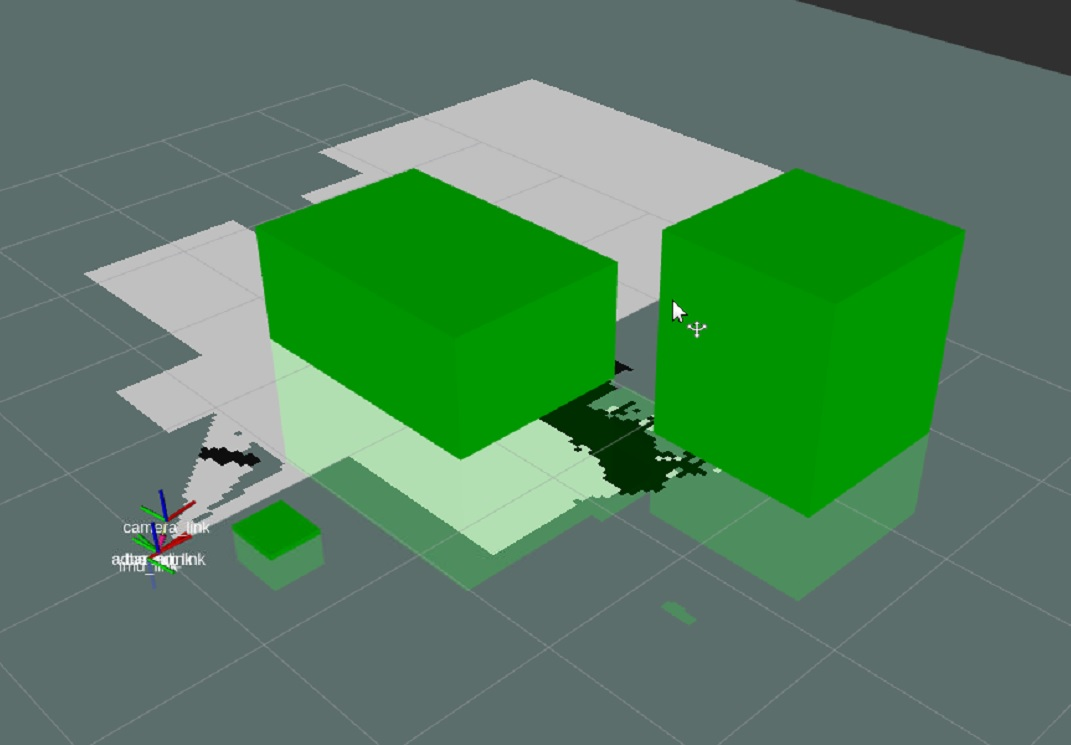
On the server rviz, you will see how ADBSCAN interprets the Intel® RealSense™ data based on real objects around the robot:
- Green blocks indicate objects around.
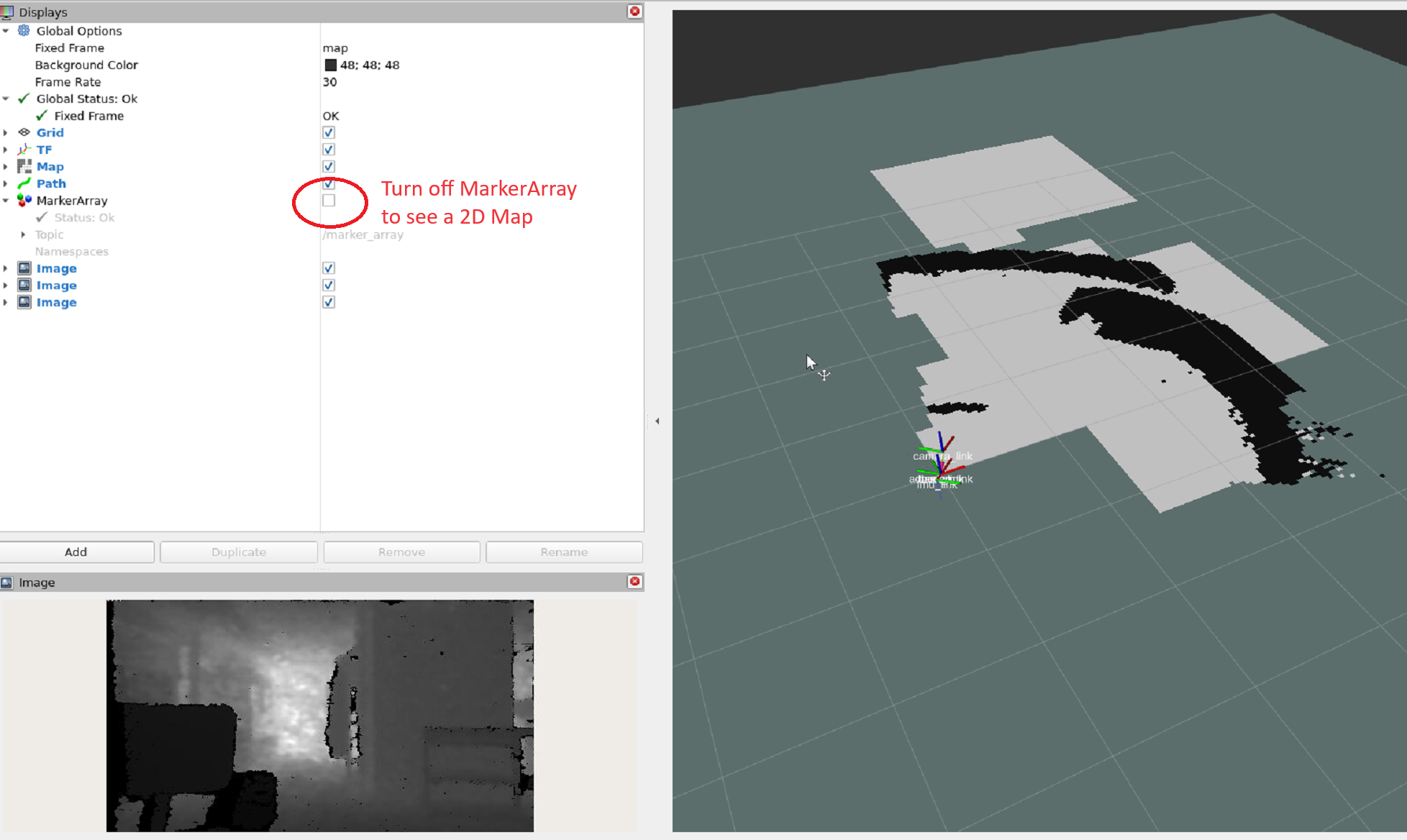
- Turn off MarkerArray in rviz to see a 2D Map generated by FastMapping.
Default ADBSCAN view in the rviz window:
Enable FastMapping 2D map view by turning off MakerArray check-box:
Troubleshooting¶
For general robot issues, go to: Troubleshooting for Robotics SDK Tutorials .