FastMapping Algorithm¶
FastMapping application is the Intel® optimized version of octomap.
For more information on FastMapping, see How it Works.
Run the FastMapping Standalone Application¶
To download and install the Fastmapping standalone sample application run the command below:
sudo apt-get install ros-humble-fast-mapping

Note
The
ros-humble-fast-mappingpackage includes a ROS2 bag, which will be used for this tutorial. After the installation, the ROS2 bag can be found at/opt/ros/humble/share/bagfiles/spinning/Set up your ROS 2 environment
source /opt/ros/humble/setup.bash
Run the FastMapping sample application using a ROS2 bag of a robot spinning:
/opt/ros/humble/share/fast_mapping/tutorial-rosbag/fastmapping.sh
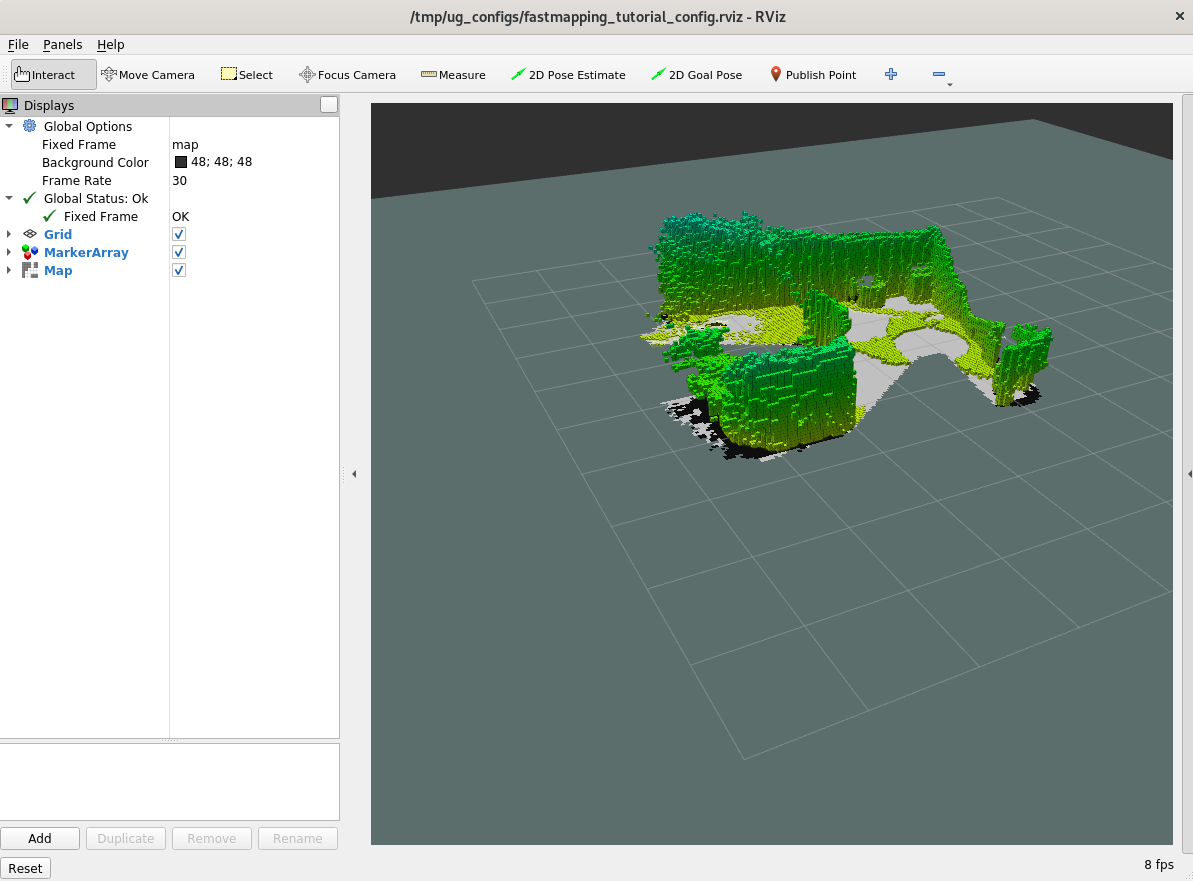
Expected output:
To close this application, type
Ctrl-cin the terminal where you ran the bash script.
Troubleshooting¶
For general robot issues, go to: Troubleshooting for Robot Tutorials.