Follow-me Introduction¶
Follow-me is a Robotics SDK application for following a target person with point cloud sensor (2D Lidar/depth camera) as inputs. These inputs are passed to Intel®-patented Adaptive DBScan algorithm to detect the location of the target and subsequently, publish motion command messages for a differential drive robot. This is a computationally lightweight application where the core clustering method, namely ADBScan can run at 120 fps at Intel® Tiger Lake processor with 2D Lidar data. This tutorial describes how to launch a demo of this application with input point clouds published by recorded ROS 2 bag files.
Getting Started¶
Install Deb package¶
Install ros-humble-adbscan-ros2-follow-me Deb package from Intel® Robotics SDK APT repository
sudo apt update sudo apt install ros-humble-adbscan-ros2-follow-me
Install the following package with ROS 2 bag files in order to publish point cloud data from LIDAR or Intel® RealSense™ camera
sudo apt install ros-humble-bagfile-laser-pointcloud
Run Demo with 2D Lidar¶
Run the following script to run the demo with 2D LIDAR
sudo chmod +x /opt/ros/humble/share/adbscan_ros2_follow_me/scripts/demo_lidar.sh /opt/ros/humble/share/adbscan_ros2_follow_me/scripts/demo_lidar.sh
You will see the following information on the screen:
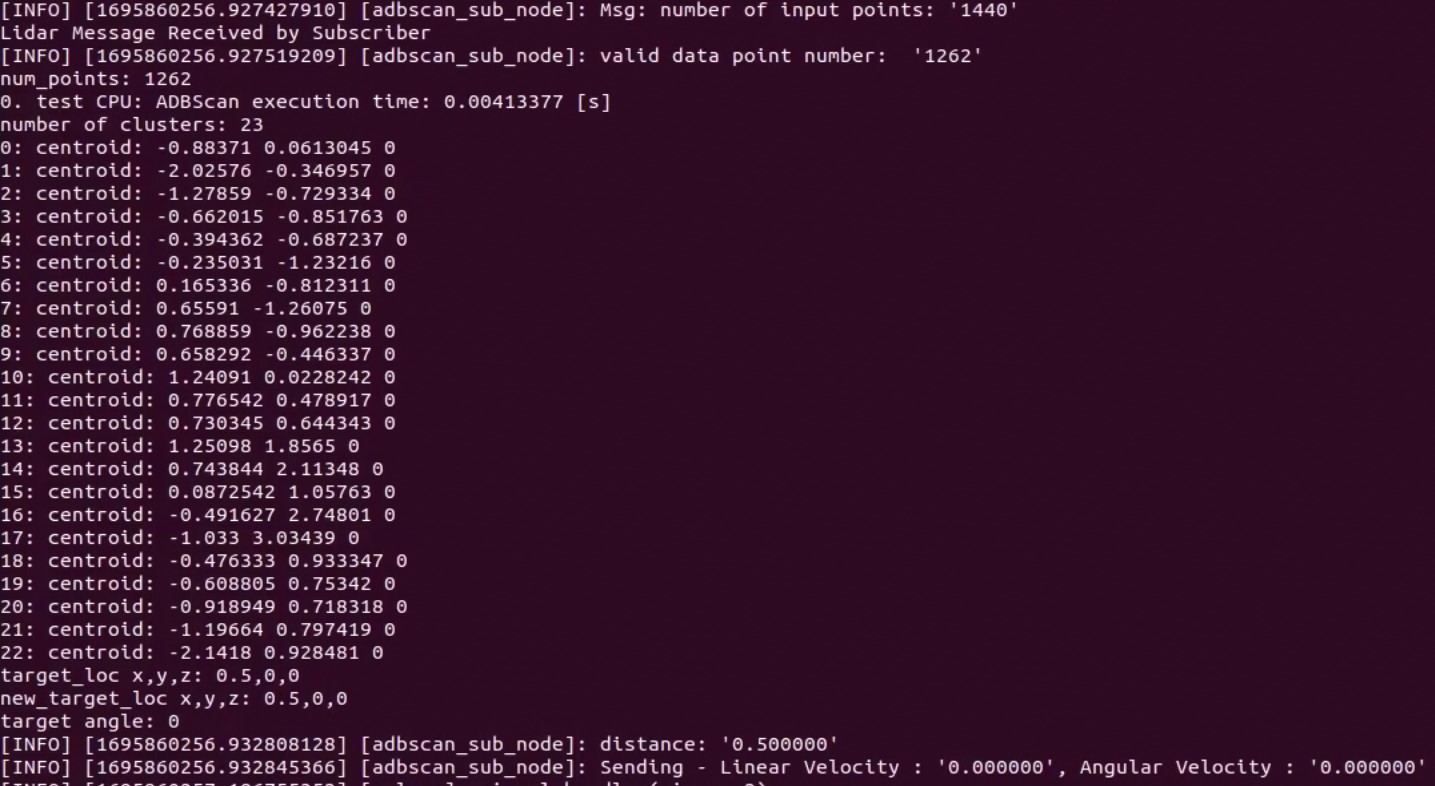
It displays the number of valid data points in the ROS 2 bag file, the centroid of the detected clusters, as well as the published linear and angular velocity of the robot.
Run Demo with Intel® RealSense™ Camera¶
Run the following script to run the demo with Intel® RealSense™ camera input
sudo chmod +x /opt/ros/humble/share/adbscan_ros2_follow_me/scripts/demo_RS.sh /opt/ros/humble/share/adbscan_ros2_follow_me/scripts/demo_RS.sh
You will observe similar output as Run Demo with 2D Lidar
One can launch a robot driver package to subscribe to the twist msg published by the follow-me
application and subsequently, observe the robot in action (following a target person).
We validated the application with a Pengo robot where the follow-me algorithm is executed on an
Intel® TigerLake processor. Please find the demo videos below:
Demo 1 with Lidar |
|
Demo 2 with Lidar |
|
Demo 1 with Realsense Camera (Also shows temporary occlusion handling) |
|
Demo 2 with Realsense Camera in which robot is following a moving box |
Note
The target needs to be at 0.5 m distance in front of the robot to initiate the tracking in each scenario.
Troubleshooting¶
Failed to install Deb package: Please make sure to run
sudo apt updatebefore installing the necessary Deb packages.You can stop the demo anytime by pressing
ctrl-C.