FastMapping Algorithm¶
FastMapping application is the Intel® optimized version of octomap.
For more information on FastMapping, see How it Works .
Run the FastMapping Standalone Application¶
To download and install the Fastmapping standalone sample application run the command below:
sudo apt-get install ros-humble-fast-mapping

Note
The
ros-humble-fast-mappingpackage includes a ROS 2 bag, which will be used for this tutorial. After the installation, the ROS 2 bag can be found at/opt/ros/humble/share/bagfiles/spinning/Set up your ROS 2 environment
source /opt/ros/humble/setup.bash
Run the FastMapping sample application using a ROS 2 bag of a robot spinning:
/opt/ros/humble/share/fast_mapping/tutorial-rosbag/fastmapping.sh
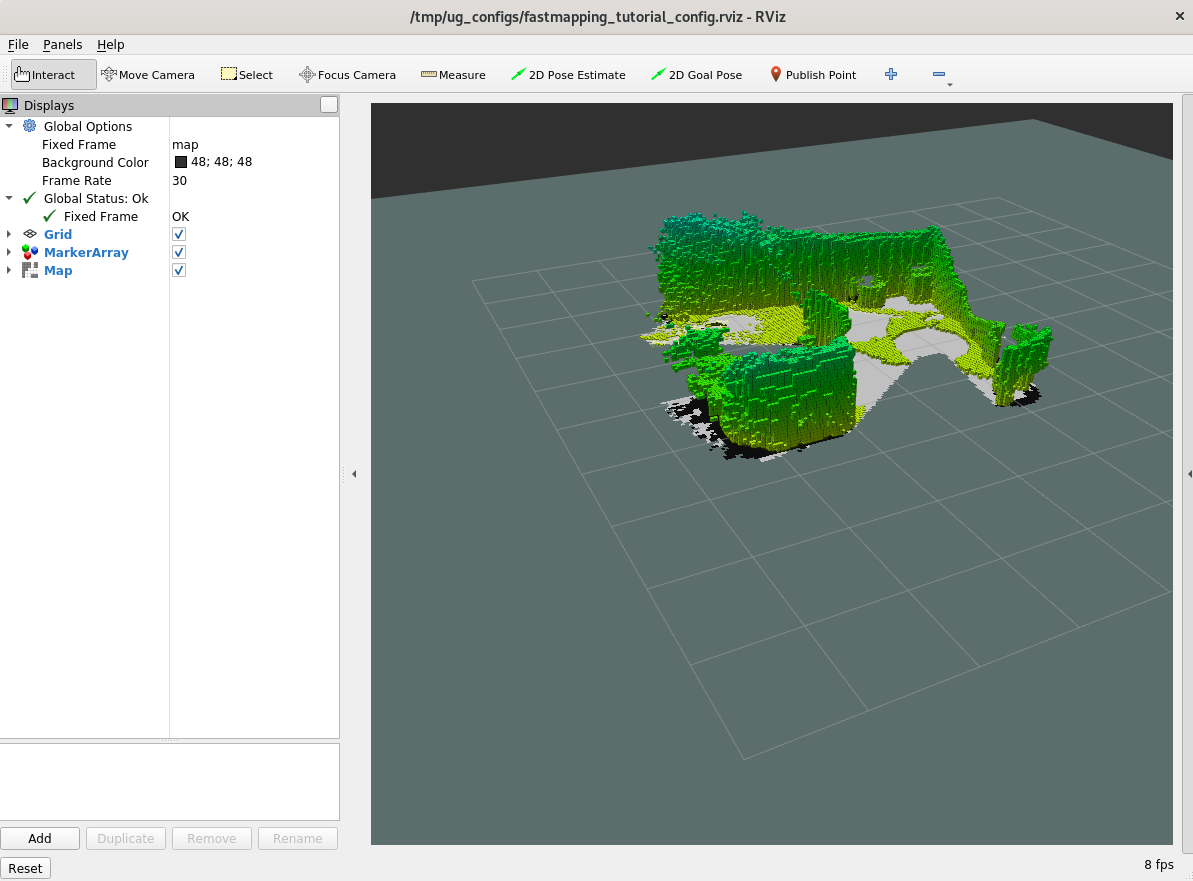
Expected output:
To close this application, type
Ctrl-cin the terminal where you ran the bash script.
Troubleshooting¶
For general robot issues, go to: Troubleshooting for Robot Tutorials .