Gazebo Pick & Place Demo¶
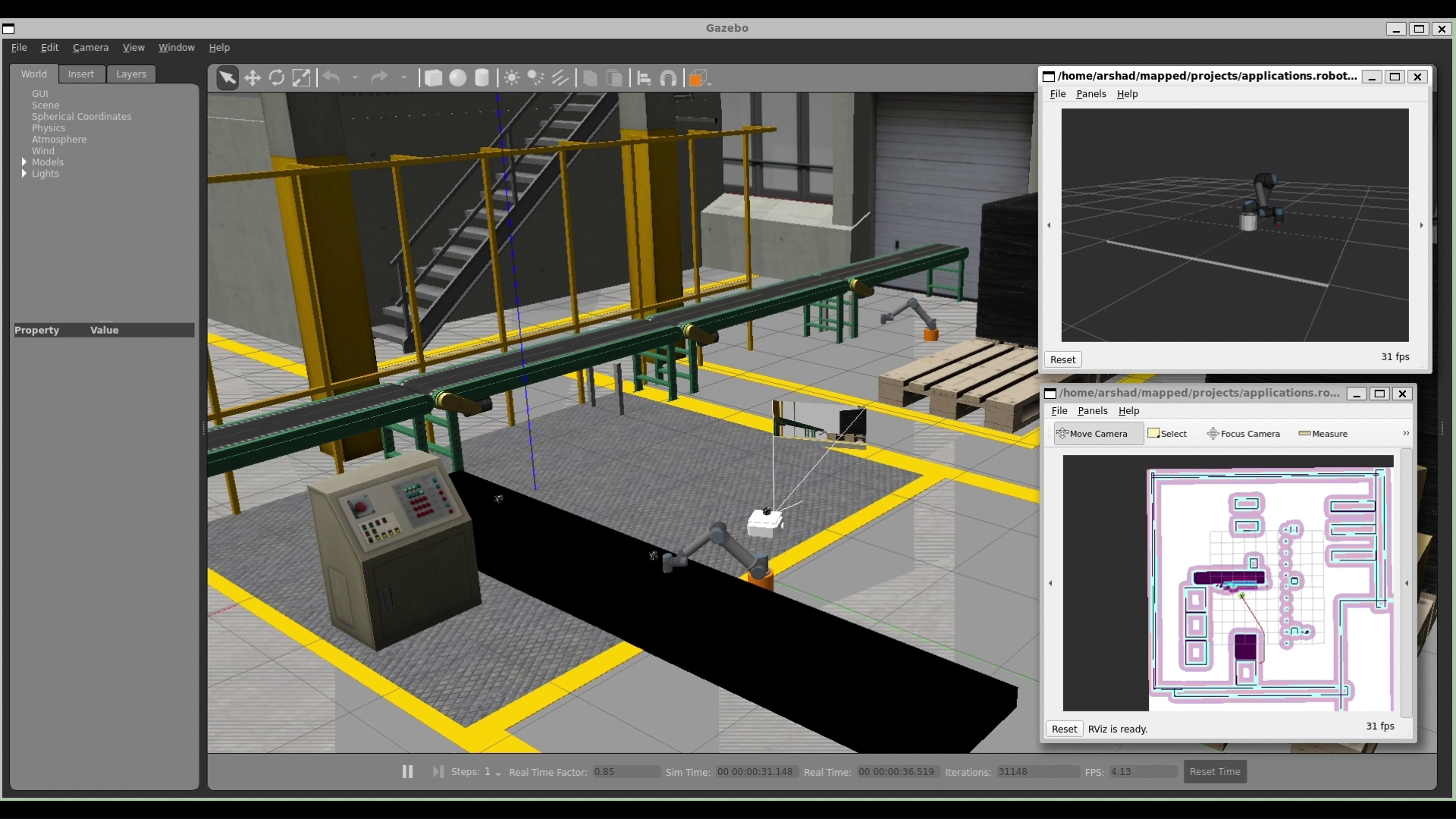
This Pick-n-Place demo is a simulation implemented using ROS 2 Humble and Gazebo Classic. The project showcases the interaction of a conveyor belt, a TurtleBot3 Autonomous Mobile Robot (AMR), and two UR5 robotic arms (ARM) in a simulated environment. The aim is to harness the capabilities of both the Nav2 and MoveIt2 stacks, presenting a comprehensive demonstration of multi-robot coordination in a simulation environment.
Getting Started¶
Install Debian Package¶
Install ros-humble-picknplace-simulation Debian package from Intel® Robotics SDK APT repository.
sudo apt update sudo apt install ros-humble-picknplace-simulation
Run Demo¶
source /opt/ros/humble/setup.bash ros2 launch picknplace warehouse.launch.py
FastDDS as backend some times causing stability issues. Recommended to run with cyclone DDS.
RMW_IMPLEMENTATION=rmw_cyclonedds_cpp ros2 launch picknplace warehouse.launch.py
Overview¶
The setup consists of:
Two robotic arms: Based on the UR5 model.
One Autonomous Mobile Robot (AMR): A customized version of the TurtleBot3.
The robotic arms are controlled using the MoveIt2 stack, whereas the AMR is navigated using the Nav2 stack. Each robot operates within its own namespace, showcasing the seamless integration of multiple robots, each with its designated control stack, in a unified Gazebo environment.
The primary goal of this demo is to illustrate the combined and coordinated use of Nav2 and MoveIt2 stacks in a Gazebo simulation.
The demonstration workflow is as follows:
One of the robotic arms (ARM1) picks up an item from a moving conveyor belt.
The item is then placed onto the AMR, which is based on the TurtleBot3 Waffle design.
Using Nav2, the AMR autonomously plans and traverses a path to the second robotic arm, referred to as ARM2.
Note: This demo prioritizes the representation of combined stack usage over intricate details. Some assumptions have been made for simplicity. For instance, the item’s location on the conveyor belt is sourced directly from Gazebo without integrating perception systems.
Other Details¶
State Machine Implementation: The demo employs Smach library to design the state machine that acts as the controller for both ARMs in Python. Smach is a valuable tool for creating, managing, and analyzing hierarchical state machines for robotic operations.
Moveit wrapper: The moveit commands are send using a modified version of pymoveit2 library which originally maintained at link . The modified version introduces several enhancements and rectifies existing bugs. However, with the recent availability of Python bindings in the latest Moveit2 stack, it’s advisable to use that instead.
Object location: This demonstration bypasses perception mechanisms. Instead, object locations are sourced from the get_entity_state service, courtesy of the Gazebo plugin. For future integrations, the objects on the conveyor are marked with Aruco markers, readying them for vision-based use cases.
Serialize Gazebo model spawning: To maintain the integrity of ROS 2 namespaces, Gazebo models (like AMR and arms) undergo sequential deployment. In ROS 2 control, the controller manager alters the global gzserver namespace based on the current robot’s namespace to facilitate subsequent controller initialization. This can disrupt the namespace configuration for other models launching ROS 2 nodes via their embedded plugins. Consequently, the demo orchestrated the model deployments to guarantee a clean global namespace before deploying any subsequent model. This namespace reset is achieved through a custom Gazebo plugin found in the robot_config repository.
Cyclone DDS usage: It’s recommended to execute the demo using Cyclone DDS over FastDDS. We observed some instability with FastDDS, potentially due to the multitude of nodes and associated interfaces instantiated in the gzserver. This might overload a singular DDS participant. In tests, Cyclone DDS emerged as the more reliable choice, particularly when handling a vast number of nodes established by a single entity. This might also be attributable to FastDDS’s default configurations, optimized for speed.
To utilize Cyclone DDS, enable it through the following commands. The apt install command issued earlier will ensure Cyclone DDS is installed.
sudo apt-get install ros-humble-rmw-cyclonedds-cpp export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
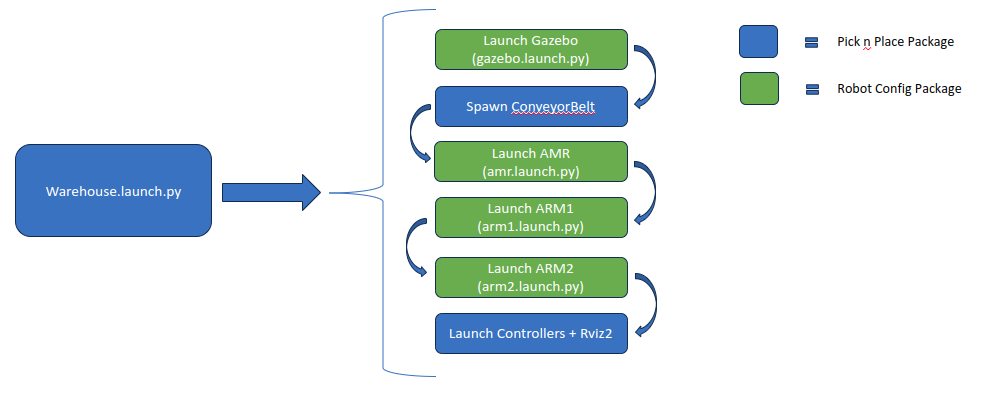
Launch Sequence¶
Robots are spawned in Gazebo, as illustrated in the diagram.
Sending Nav2 Pose to AMR¶
Use the following command to set a new goal for the AMR:
ros2 action send_goal /amr1/navigate_to_pose nav2_msgs/action/NavigateToPose "pose: {header: {frame_id: map}, pose: {position: {x: -3.2, y: -0.50, z: 0.0}, orientation:{x: 0.0, y: 0.0, z: 0, w: 1.0000000}}}"
Reusing ARM and AMR modules¶
The robot_config package offers a straightforward way to instantiate both AMR (Autonomous Mobile Robot) and UR5 ARM robotic configurations. You can effortlessly integrate these configurations into any ROS 2 launch file to visualize and simulate them in Gazebo.
Spawning AMR in Gazebo
amr_launch_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(robot_config_launch_dir, 'amr.launch.py')),
launch_arguments={
'amr_name': 'amr1',
'x_pos': '1.0',
'y_pos': '1.0',
'yaw': '0.0',
'use_sim_time': 'true',
'launch_stack': 'true',
'wait_on': 'service /spawn_entity'
}.items()
)
ld.add_action(amr_launch_cmd)
Spawning ARM in Gazebo
arm1_launch_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(robot_config_launch_dir, 'arm.launch.py')),
launch_arguments={ 'arm_name': 'arm1',
'x_pos': '2.0',
'y_pos': '2.0',
'z_pos': '0.01',
'yaw': '0.0',
'pedestal_height': '0.16',
'use_sim_time': 'true',
'launch_stack': 'true',
'wait_on': 'service /spawn_entity'
}.items()
)
ld.add_action(arm1_launch_cmd)
This simulation has been tested on Gazebo Classic with ROS 2 Humble. This project provides an example of a simple multi-robot system. It can serve as a resource for anyone interested in robotic simulations.
Troubleshooting¶
For general robot issues, go to: Troubleshooting for Robot Tutorials .