Intel-optimized ADBSCAN Algorithm¶
ADBSCAN (Adaptive DBSCAN) is an Intel® patented algorithm. It is a highly adaptive and scalable object detection and localization algorithm, tested successfully to detect objects at all ranges for 2D Lidar, 3D Lidar, and Intel® RealSense™ depth camera. This method automatically computes clustering parameters (radius and minimum number of points that defines a cluster) based on the distance from the sensor and the data density in its field of view, thus alleviating the guesswork from parameter selection and enabling efficient hierarchical clustering. ADBSCAN increases detection range by 30%-40% and detects 20%-30% more objects, compared to the state-of-the-art methods. It has been gainfully used in multiple applications such as 2D/3D Lidar or Intel® RealSense™ based object tracking, multi-modal object classification (Camera + Lidar), surface segmentation, Lidar based object classification, occupancy grid generation etc.
In this version of ADBSCAN, the algorithm has been optimized for Intel® SOC by replacing linear neighbor point search with an optimized oneAPI™ PCL library (offloaded to GPU), as well as refactoring the clustering algorithm. It has been tested and validated on 13th Generation Intel® Core™ processors with Intel® Iris® Xe Integrated Graphics, 12th Generation Intel® Core™ processors with Intel® Iris® Xe Integrated Graphics and 11th Generation Intel® Core™ processors with Intel® Iris® Xe Integrated Graphics. This tutorial describes how to run this Intel-optimized ADBSCAN algorithm and compare the execution time with the unoptimized version.
Getting Started¶
The Intel-optimized and unoptimized versions of the algorithm are distributed as ros-humble-adbscan-oneapi and ros-humble-adbscan-ros2, respectively.
We demonstrate the gain in latency for a ROS 2 bag file with point cloud data from a Intel® RealSense™ camera. The amount of gain is prominent when the input is dense or the
number of input points is large. In case of a 2D LIDAR, the point cloud is comparatively sparse and hence, not showed here.
Install and run the ROS 2 bag file Deb package¶
Install the following package with ROS 2 bag files in order to publish point cloud data from LIDAR and Intel® RealSense™ camera:
sudo apt install ros-humble-bagfile-laser-pointcloud
Run the following commands in a terminal:
source /opt/ros/humble/setup.bash ros2 bag play --loop /opt/ros/humble/share/bagfiles/laser-pointcloud
This command will launch the ROS 2 bag file and publish the recorded point cloud data to respective topics. You will view the following screen output:

ros2 topic list command will show a list of the published topics which include /scan (point cloud from 2D LIDAR) and /camera/depth/color/points (point cloud from Intel® RealSense™ camera).
Install and run optimized Deb package¶
Install ros-humble-adbscan-oneapi Deb package from Intel® Robotics SDK APT repository:
sudo apt update sudo apt install ros-humble-adbscan-oneapi
Run the following command in a terminal:
source /opt/ros/humble/setup.bash ros2 run adbscan_ros2 adbscan_sub --ros-args --params-file /opt/ros/humble/share/adbscan_ros2/config/adbscan_sub_RS.yaml
This will print tables with the benchmarking data as showed below:
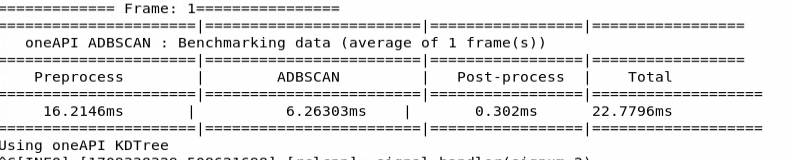
The table shows a breakdown between pre-processing, ADBSCAN execution and post-processing time. The caption at the bottom of the table will print which PCL library is being used.
Install and run standard (unoptimized) Deb package¶
Install ros-humble-adbscan-ros2 Deb package from Intel® Robotics SDK APT repository
sudo apt update sudo apt install ros-humble-adbscan-ros2
Run the following command in a terminal
source /opt/ros/humble/setup.bash ros2 run adbscan_ros2 adbscan_sub --ros-args --params-file /opt/ros/humble/share/adbscan_ros2/config/adbscan_sub_RS.yaml
This will print a similar table with the benchmarking data.

You will see that the ADBSCAN execution time is much smaller for the optimized version compared to the standard one. The pre-processing and post-processing time should be more or less of the same range in both versions, since the input bag file is identical. The amount of gain in execution time will depend on the system configuration, the size of the point cloud data in the input frames etc. We observed an average gain of ~5-8x in 13th Generation Intel® Core™ processors with Intel® Iris® Xe Integrated Graphics, 12th Generation Intel® Core™ processors with Intel® Iris® Xe Integrated Graphics and 11th Generation Intel® Core™ processors with Intel® Iris® Xe Integrated Graphics for this specific ROS 2 bag file.
Re-configurable parameters¶
The optimized ADBSCAN has a user-defined parameter called oneapi_library to choose from a set of PCL libraries: oneapi_kdtree, oneapi_octree, pcl_kdtree. The default value is oneapi_kdtree.
Moreover, one can run both optimized and unoptimized packages with a parameter called benchmark_number_of_frames. It will take an integer (greater or equal to 1) as input and the benchmarking table will produce the average execution time of benchmark_number_of_frames frames, instead of a single frame (default value).
For example, you can use the following command to run the optimized ADBSCAN with oneapi_octree library and display the benchmarking data for an average of 5 frames:
ros2 run adbscan_ros2 adbscan_sub --ros-args --params-file /opt/ros/humble/share/adbscan_ros2/config/adbscan_sub_RS.yaml -p benchmark_number_of_frames:=5 -p oneapi_library:=oneapi_octree
A complete list of the reconfigurable parameters is given below:
Configurable Parameters¶
Lidar_typeType of the point cloud sensor. For Intel® RealSense™ camera and LIDAR inputs, the default value is set to
RSand2D, respectively.
Lidar_topicName of the topic publishing point cloud data.
VerboseIf this flag is set to
True, the locations of the detected target objects will be printed as the screen log.
subsample_ratioThis is the downsampling rate of the original point cloud data. Default value = 15 (i.e., every 15-th data in the original point cloud is sampled and passed to the core ADBSCAN algorithm).
x_filter_backPoint cloud data with x-coordinate >
x_filter_backare filtered out (positive x direction lies in front of the robot).
y_filter_left,y_filter_rightPoint cloud data with y-coordinate >
y_filter_leftand y-coordinate <y_filter_rightare filtered out (positive y-direction is to the left of robot and vice versa)``
z_filterPoint cloud data with z-coordinate <
z_filterwill be filtered out. This option will be ignored in case of 2D Lidar.
Z_based_ground_removalFiltering in the z-direction will be applied only if this value is non-zero. This option will be ignored in case of 2D Lidar.
base,coeff_1,coeff_2,scale_factorThese are the coefficients used to calculate the adaptive parameters of the ADBSCAN algorithm. These values are pre-computed and recommended to keep unchanged.
oneapi_libraryAvailable options are:
oneapi_kdtree,oneapi_octree,pcl_kdtree.oneapi_kdtreeandoneapi_octreeallow the algorithm to use optimized oneAPI™ KdTree or octree library and offload the neighbor point search method to GPU.pcl_kdtreeoption uses the standard PCL KdTree library, not optimized for Intel® SOC.
benchmark_number_of_framesAny integer greater or equal to 1. This is the number of frames over which the average execution time is executed and printed in the benchmarking table.
Troubleshooting¶
Failed to install Deb package: Please make sure to run
sudo apt updatebefore installing the necessary Deb packages.You can stop the demo anytime by pressing
ctrl-C.The screen log will show number of points after subsampling and number of points after filtering. If these values are zero, please make sure to adjust the following parameters to make sure these values are greater than zero.
Decrease subsample_ratio
Increase the absolute values of x_filter_back, y_filter_right, y_filter_left. Please see the description of these parameters in the table and adjust according to your environment.
IA-optimized ADBSCAN offloads the neighbor search to GPUs when using oneapi_kdtree and oneapi_octree library. Please make sure that your system is equipped with working gpu, if using these libraries. You can use lspci command in a Linux terminal to view GPU info.
ros-humble-adbscan-ros2 and ros-humble-adbscan-oneapi are mutually exclusive Deb packages. Please refrain from installing them simultaneously like this
apt install ros-humble-adbscan-ros2 ros-humble-adbscan-oneapi. Always install the packages sequentially, as showed in this document.