Step 6. Run a ROS 2 Sample Application in the Docker* Container#
This step tests your install.
After this step, to deepen your knowledge about complex scenarios, advanced features, and debugging, see the Developer Guide.
Check if your installation has the turtlesim Docker* image.
docker images |grep amr-turtlesim #if you have it installed, the result is: amr-turtlesim
Note
If the image is not installed, continuing with these steps triggers a build that takes longer than an hour (sometimes, a lot longer depending on the system resources and internet connection).
If the image is not installed, Intel® recommends installing the Robot Complete Kit (see Get Started Guide for Robots Step 3).
Check that EI for AMR environment is set:
echo $AMR_TUTORIALS # should output the path to EI for AMR tutorials /home/user/edge_insights_for_amr/Edge_Insights_for_Autonomous_Mobile_Robots_2023.1/AMR_containers/01_docker_sdk_env/docker_compose/05_tutorials
If nothing is output, refer to Get Started Guide for Robots Step 5 for information on how to configure the environment.
Run an automated yml file that opens a ROS 2 sample application inside the EI for AMR Docker* container.
docker compose -f $AMR_TUTORIALS/turtlesim.tutorial.yml up
Go to Plugins > Services > Service Caller: Choose to move turtle1 by choosing (from the Service drop-down list) /turtle1/teleport_absolute and make sure you changed x and y coordinates for the original values. Press Call. The turtle should move. Close the service caller window by pressing x. Then type
Ctrl-c.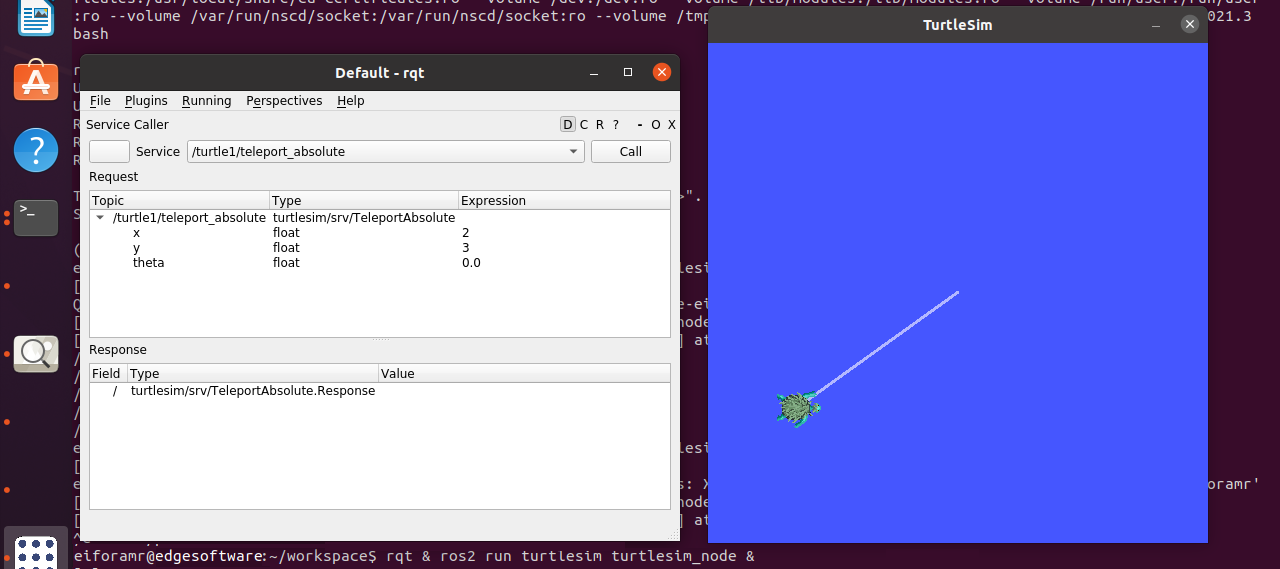
To close this, do the following:
Type
Ctrl-cin the terminal where you did the up command.Run this command in another terminal:
docker compose -f $AMR_TUTORIALS/turtlesim.tutorial.yml down
For an explanation of what happened, open the yml file:
The first 23 lines are from the EI for AMR infrastructure.
Line 26 starts the
turtlesimROS 2 node.Line 31 starts the rqt so that the turtle can be controlled.