Step 5: Install the EI for AMR Software#
This step runs a script that downloads components and installs Edge Insights for Autonomous Mobile Robots on your target system. The software installation takes about 10 minutes. The completion time depends on your target system and Internet connection.
Set up a proxy (optional): If a proxy is required to connect to the Internet, add the proxy settings as described below, updating
<http_proxy>and<https_proxy>to your actual proxy.Add proxies in
/etc/apt/apt.conf.d/proxy.conf:echo 'Acquire::http::proxy "http://<http_proxy>:port";' | sudo tee -a /etc/apt/apt.conf.d/proxy.conf echo 'Acquire::https::proxy "http://<https_proxy>:port";' | sudo tee -a /etc/apt/apt.conf.d/proxy.conf
Change the environment.
Change the environment for all users on the system:
sudo su echo 'export http_proxy="http://<http_proxy>:port"' >> /etc/environment echo 'export https_proxy="http://<https_proxy>:port"' >> /etc/environment echo 'export ftp_proxy="http://<ftp_proxy>:port"' >> /etc/environment echo 'export no_proxy="<no_proxy>"' >> /etc/environment exit source /etc/environment
Note
These steps are needed only once per host. They do not have to be done for different users or different logins of the same user.
Change the environment for the current user only:
echo 'export http_proxy="http://<http_proxy>:port"' >> ~/.bashrc echo 'export https_proxy="http://<https_proxy>:port"' >> ~/.bashrc echo 'export ftp_proxy="http://<ftp_proxy>:port"' >> ~/.bashrc echo 'export no_proxy="<no_proxy>"' >> ~/.bashrc source ~/.bashrc
Read and follow best practices as described in this Linux* wiki about environment variables.
Edit the /etc/sudoers file with visudo:
sudo visudo # Add after other lines that add Defaults: Defaults env_keep += "ftp_proxy http_proxy https_proxy no_proxy"
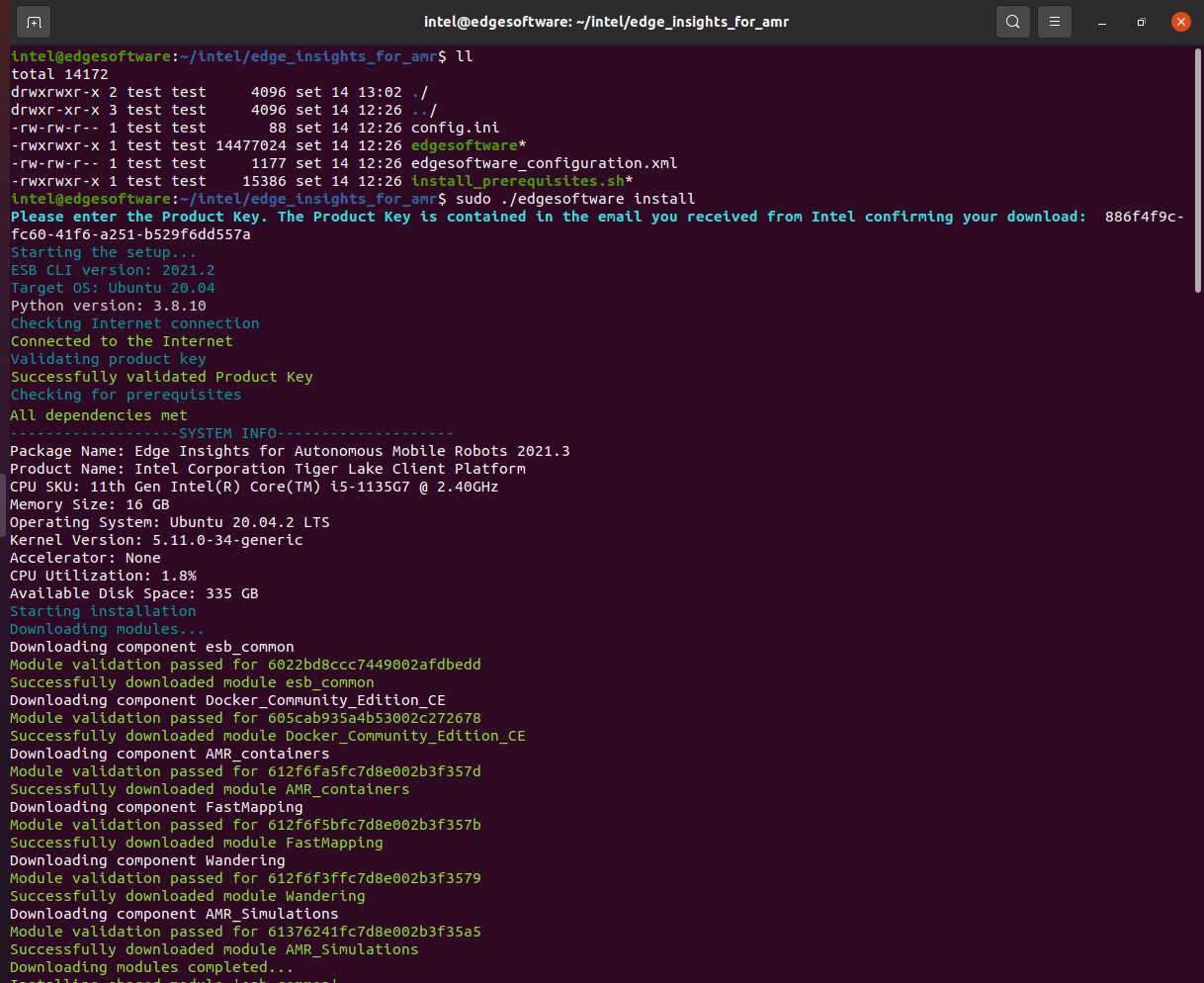
Run the following commands to go to the directory, change permission of the executable edgesoftware file, and install the bundle:
cd edge_insights_for_amr chmod 775 edgesoftware sudo groupadd docker sudo usermod -aG docker $USER newgrp docker ./edgesoftware install
Type the product key at the prompt:
Note
The product key is displayed on the download page. Contact Support Forum if it is not.
Based on components selected and system configuration, you might be prompted for additional actions. For example, if your system is behind a proxy, you are asked to enter proxy settings.
When the installation is complete, you see an installation complete message and the installation status for each module.
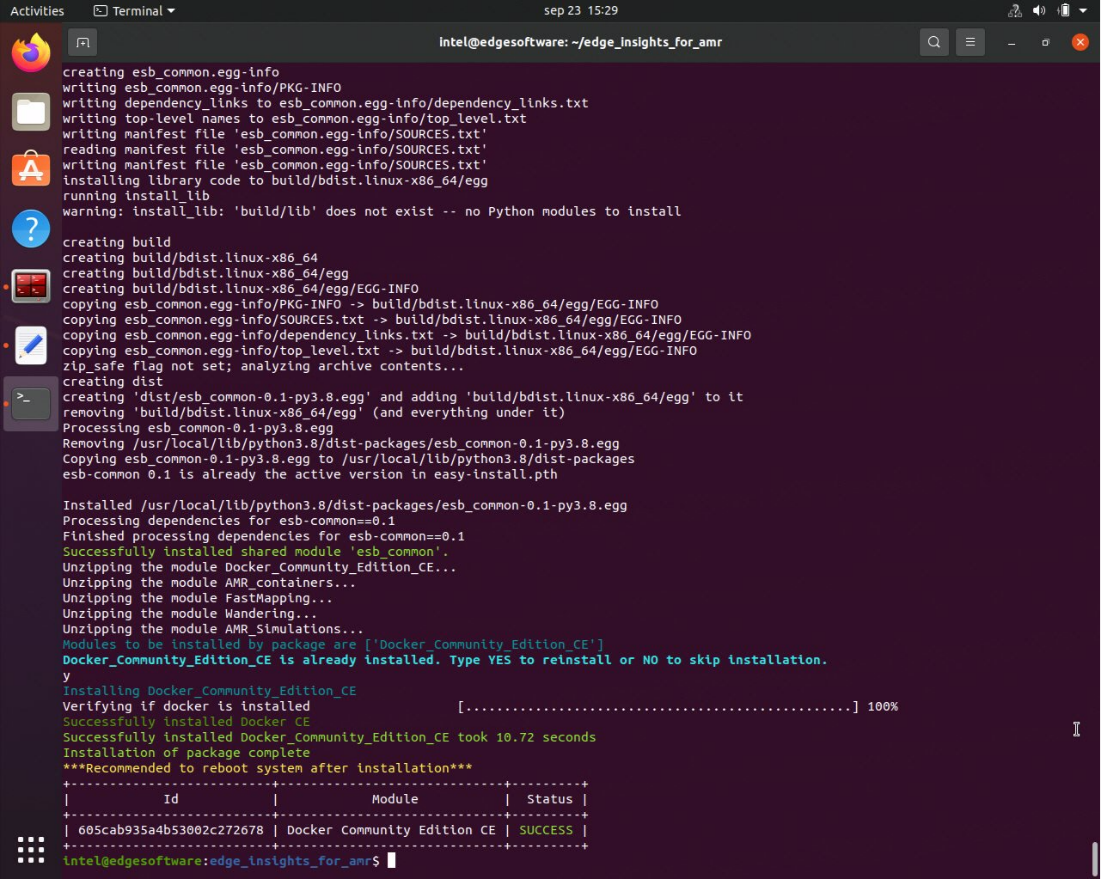
If any of the installed modules report a failure in the Status column due to a break in the internet connection or for any other reason, run the install again:
./edgesoftware install
Unpack the example ROS bags archive. ROS bags contain data recorded on real robots that is used in some of the tutorials. The unpacked ROS bags require about 18 GB of storage space.
unzip 01_docker_sdk_env/docker_compose/06_bags.zip -d 01_docker_sdk_env/docker_compose/ sudo chmod -R 0777 01_docker_sdk_env/docker_compose/06_bags
Set the correct ownership:
sudo chown -R $USER:$USER .
Set the correct permissions:
find . -type d -exec chmod g+w {} +
Configure this user’s shell environment for EI for AMR. The
EIFORAMR_HOMEvariable should contain the absolute path to the EI for AMR installation directory. Thedocker_compose.sourcefile defines additional variables used by EI for AMR and the tutorials.Add the following lines to
.bashrcto have access to them from all interactive shells:# Use your installation path echo 'export EIFORAMR_HOME=$HOME/edge_insights_for_amr/Edge_Insights_for_Autonomous_Mobile_Robots_2023.1' >> ~/.bashrc echo 'source $EIFORAMR_HOME/AMR_containers/01_docker_sdk_env/docker_compose/common/docker_compose.source' >> ~/.bashrc
Choose a
ROS_DOMAIN_IDvalue, an integer between 0 and 101. This is used by ROS nodes to communicate locally and over the network. If you are the only one using ROS on your network, any value in the interval is good. Otherwise you need to choose a value that is not used by anybody else on your network. See the section onROS_DOMAIN_IDon the Troubleshooting page for more information.echo 'export ROS_DOMAIN_ID=42' >> $HOME/.bashrc
Verify that all Docker* images were downloaded:
docker image list
Expected output includes all downloaded containers:
REPOSITORY TAG IMAGE ID CREATED SIZE amr-nav2 2023.1 ... ... ... eiforamr-full-flavour-sdk 2023.1 ... ... ... amr-object-detection 2023.1 ... ... ... . .
To apply all the changes to the user environment, log out and then log in again.
Note
Installation failure logs are available at:
/var/log/esb-cli/Edge_Insights_for_Autonomous_Mobile_Robots_<version>/<Component_name>/install.log
Troubleshooting#
If the installer is blocked at checking the Internet connection, refer to Troubleshooting.
If you encounter any Docker* pull-related issues during the installation process, refer to Troubleshooting.